
Определение стоянок
Система обнаружения стоянок определяет, когда объект неподвижен в течение определенного периода времени и в пределах установленного порога скорости, используя данные GPS.
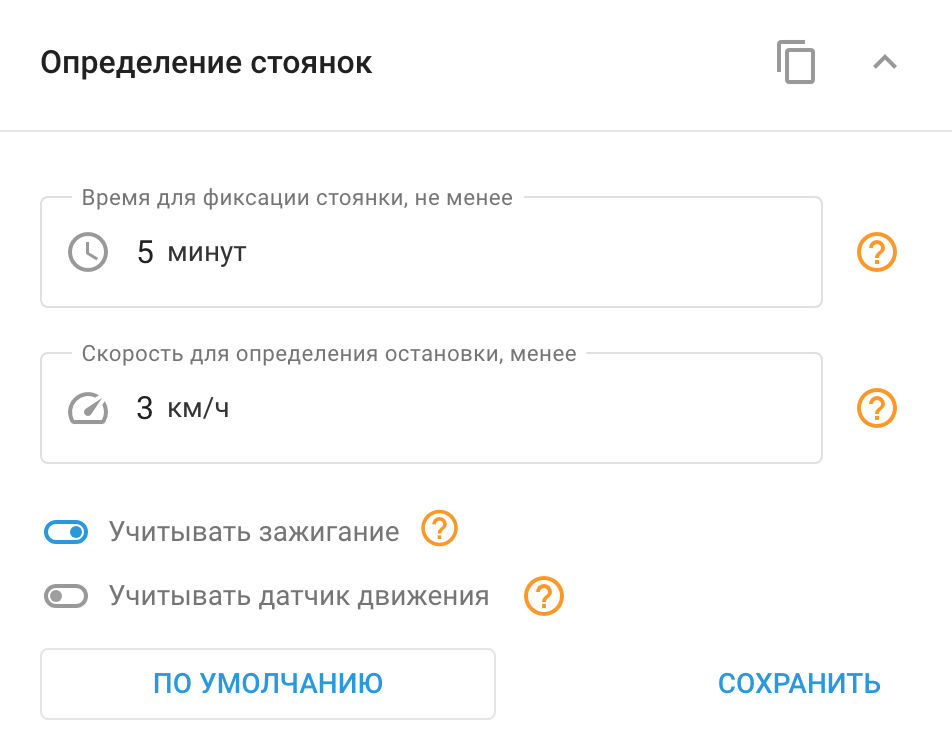
Параметры для обнаружения парковки:
Минимальное время обнаружения холостого хода (
min_parking): Это минимальное время, в течение которого объект должен оставаться неподвижным, чтобы считаться припаркованным.Максимальная частота вращения холостого хода (
min_speed): Это порог скорости, при котором объект должен оставаться на месте, чтобы быть определенным как припаркованный.
По умолчанию эти параметры установлены на 5 минут и 3 км/ч соответственно.
Условия обнаружения парковки:
По скорости и времени:
Состояние парковки определяется, когда скорость объекта падает ниже определенного значенияmin_speedи остается там дольше, чемmin_parking. Остановки короче, чемmin_parkingне считаются парковкой и не прерывают поездку.Учитывая зажигание:
Поездка начинается, если скорость больше или равна
min_speedпри включенном зажигании.Поездка заканчивается, если скорость падает ниже
min_speedи либо истекшее время превышаетmin_parkingили зажигание выключено.
Учитывая датчик движения:
Поездка начинается, если скорость больше или равна
min_speedи датчик движения обнаруживает движение.Поездка заканчивается, если скорость падает ниже
min_speedили датчик движения не обнаруживает движения, а истекшее время превышаетmin_parking.
Учитывая как движение, так и зажигание:
Состояние зажигания имеет приоритет перед датчиком движения.
Поездка начинается, если скорость больше или равна
min_speedЕсли датчик движения обнаруживает движение и зажигание включено.Поездка заканчивается, если скорость падает ниже
min_speedили датчик движения не обнаруживает движения, а истекшее время превышаетmin_parkingпри выключенном зажигании.
Эти настройки позволяют точно настроить распознавание парковки, чтобы оно точно отражало реальное поведение автомобиля, минимизируя ложные обнаружения и повышая точность отслеживания поездок.